در عصر حاضر، نقش نرمافزار در سیستمهای حیاتی بیش از پیش گسترش یافته است. از خودروهای هوشمند گرفته تا زیرساختهای ابری، شبکههای ارتباطی، سامانههای سلامت، و حتی ابزارهای خانگی در خانه هوشمند، همگی وابسته به نرمافزارهایی هستند که باید با تغییرات پیوسته و گاه غیرقابل پیشبینی محیط روبهرو شوند.در چنین شرایطی، سیستمهایی که تنها بر اساس قوانین از پیش تعریفشده عمل میکنند، ناکارآمد یا حتی خطرآفرین خواهند بود.
در این صورت یک مفهوم تحت عنوان سیستمهای خودتطبیقپذیر (Self-Adaptive Systems) مطرح میشود. این نوع سیستمها طوری طراحی میشوند که بتوانند در زمان اجرا (runtime)، رفتار و ساختار خود را بدون دخالت مستقیم انسان با شرایط جدید سازگار نمایند. چنین سیستمهایی نهتنها خطاها را شناسایی و اصلاح میکنند، بلکه در برخی موارد عملکردشان را بهینه میکنند و در برابر اختلالات یا تهدیدات واکنش نشان میدهند.
سیستمهای خودتطبیقپذیر با هدف افزایش پایداری (Stability) و انعطافپذیری (Flexibility) نرمافزار در برابر ناپایداریهای محیطی طراحی میشوند. این قابلیت معمولا در سیستمهایی حیاتی است که:
منابعشان محدود و ناپایدار است.
دادههای ورودی همیشه کامل یا قابل اعتماد نیست.
نیاز به تصمیمگیری سریع و دقیق وجود دارد.
اهداف سیستم ممکن است در زمان اجرا تغییر کند.
معماری چنین سیستمهایی، دیگر نمیتواند تنها متکی بر الگوهای سنتی طراحی نرمافزار باشد. بلکه باید از ابتدا طوری طراحی شوند که چرخههای بازخورد، تصمیمگیری در زمان اجرا، و مدیریت تطبیق در ساختار آنها تعبیه شده باشد.

در عصر حاضر، بسیاری از سیستمهای نرمافزاری دیگر فقط برای اجرای مجموعهای از وظایف ثابت طراحی نمیشوند، بلکه باید بتوانند در شرایط گوناگون، خود را تنظیم کرده و عملکرد خود را حفظ و بهینه کنند. این توانایی بهویژه در سیستمهایی که با شرایط متغیر محیطی یا منابع محدود روبهرو هستند، اهمیت بیشتری دارد. سیستمهای خود تطبیق پذیر که باید در بازههای زمانی محدود و دقیق تصمیمگیری کنند، از جملهی این موارد هستند.
هدف اصلی این پروژه، طراحی یک مدل مفهومی معماری نرمافزاری خودتطبیقپذیر است که توانایی واکنش مناسب و سریع به شرایط بحرانی و تغییرات ناگهانی را داشته باشد. این مدل برای کاربرد در محیطهای بلادرنگ مانند خودروهای خودران در نظر گرفته شده است، جایی که تصمیمگیری نادرست یا تاخیر در سازگاری با محیط میتواند عواقب جبرانناپذیری داشته باشد. برای دستیابی به این هدف، تمرکز بر ایجاد مدلی بوده که هم از نظر تئوری در چارچوبهای علمی ، دارای اعتبار بوده و هم از نظر کاربردی قابل انطباق با محیطهای عملیاتی واقعی مانند خودروهای خودران باشد.
به همین خاطر به منظور دستیابی به هدف ذکر شده ، پروژه بر اساس سه گام اساسی شکل گرفته است:
1 - مرور چارچوبهای نظری موجود و مفاهیم بنیادین معماریهای تطبیقی
2 - تحلیل نیازها و چالشهای سیستمهای بلادرنگ، بهویژه خودروهای خودران
3 - طراحی یک مدل مفهومی پیشنهادی و مقایسه آن با چارچوبهای موجود
* رفتارهای کلیدی در سیستمهای خودتطبیقپذیر
پیش از آنکه با چارچوب های نظری موجود در حوزه سیستم های خودتطبیق پذیر آشنا شویم، باید بدانیم برای اینکه یک سیستم را « خودتطبیق پذیر » تلقی شود، رفتارهایی وجود دارند که باید در سطح عملکرد سیستم مشاهده شوند. خودروهای خودران یکی از مثال های خوب و کاربردی برای سیستمهای خودتطبیق پذیر نام برده میشود. برخی از این رفتارها که در مطالعات مختلف بهعنوان ویژگیهای کلیدی شناخته شدهاند، عبارتاند از :
خودپیکربندی (Self-configuration): به قابلیت تنظیم خودکار اجزای سیستم هنگام شروع به کار یا در مواجهه با تغییرات خودپیکربندی گفته می شود. به عنوان مثال در خودروهای خودران به صورت اتصال یک سنسور جدید یا تغییر محل اجرای یک سرویس مشاهده می شود.
خودترمیمی(Self-healing): خودترمیمی به معنای شناسایی و بازیابی از خطاها بهصورت خودکار می باشد. در نظر داشته باشید، به عنوان نمونه اگر ارتباط با GPS قطع شود، سیستم به دادههای جایگزین سوئیچ کند یا مسیر را به حالت ایمن تغییر دهد.
خودبهینهسازی(Self-optimization): توانایی سیستم در بهبود عملکرد، کاهش مصرف منابع، یا بهینهسازی رفتار بر اساس شرایط عملیاتی، خودبهینه سازی می گوییم. مانند کاهش مصرف انرژی در صورت کاهش بار پردازش.
خودمحافظتی(Self-protection): خودمحافظتی نیز به معنای هرگونه مقابله با تهدیدهای امنیتی یا شرایط خطرناک است. در خودروهای خودران، این میتواند به معنی تشخیص شرایط لغزندگی و فعال کردن کنترل پایداری باشد.
* مروری بر چارچوبهای معماری مطرح
در طول سالهای گذشته، پژوهشگران متعددی سعی کردهاند راهحلهایی معماری برای ساخت سیستمهای خودتطبیقپذیر ارائه دهند. نتیجهی این تلاشها به شکل چارچوبهایی کارآمد درآمده که هریک با دیدگاهی متفاوت به مسئلهی مورد نظر نگاه کردهاند. در این پروژه، چهار چارچوب اصلی مورد بررسی قرار گرفتند که بیشترین استناد و استفاده را در حوزه پژوهش و صنعت داشتهاند:
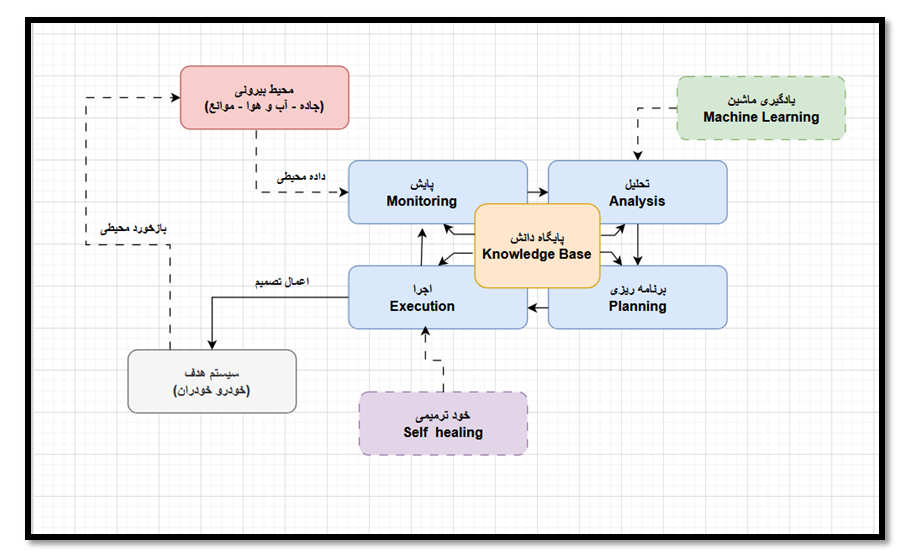
چارچوب MAPE-K : پایهگذار معماریهای تطبیقی
یکی از اولین مفاهیمی که باید درین حوزه فرا گرفت، چرخه MAPE-K است. این چرخه سادهترین و پایهایترین چارچوب نامبرده می شود که ساختار آن به عنوان، پیشنهادی برای طراحی سیستمهایی است که نیاز به انطباق دارند، نام برده می شود. این چارچوب توسط IBM در زمینه Autonomic Computing ارائه شد و بهسرعت به عنوان الگویی استاندارد در طراحی سیستمهای تطبیقی پذیرفته شد.
چرخه MAPE-K از پنج مولفه اصلی تشکیل شده است:
1. Monitoring (پایش)
2. Analysis (تحلیل)
3. Planning (برنامهریزی)
4. Execution (اجرا)
5. Knowledge (پایگاه دانش)
+ در مرحله ی نخست همانطور که از نام آن پیداست، این مولفه وظیفه دارد که دادههای مرتبط با عملکرد سیستم و شرایط محیطی را بهصورت مستمر جمعآوری و پایش کند. این دادهها میتوانند شامل اطلاعاتی از منابع سختافزاری (CPU، حافظه)، شبکه، سنسورها، و حتی ورودیهای کاربر باشند.
+ سپس در این مرحله دوم ، سیستم بررسی میکند که آیا دادههای جمعآوریشده نشاندهندهی تغییری در وضعیت مورد نظر هستند یا خیر. به عبارت دیگر، داده ها را مورد تحلیل قرار می دهد. اگر تغییری مشاهده شود، این ماژول باید تعیین کند که چه اقدامی صورت بپذیرد. تحلیل میتواند بر پایه ی قوانین از پیش تعیین شده، مدلمحور یا مبتنی بر یادگیری ماشین باشد.
نکته مهم در این میان این است که تحلیل در MAPE-K در سیستمهای کلاسیک معمولا ایستا بوده، اما در مدل پیشنهادی پروژه، به کمک یادگیری ماشین ارتقا یافته تا تطبیقپذیری بیشتری ایجاد شود.
+ در مرحله سوم، سیستم گزینههای مختلف واکنش را مورد بررسی قرار می دهد و مناسبترین تصمیم را بر اساس وضعیت موجود و سیاستهای تعریفشده انتخاب میکند. در صورت فراگیری ماشین، برنامهریزی ممکن است شامل استفاده از الگوریتمهایی نظیر بهینهسازی، جستوجوی چند گزینهای یا روشهای سلسلهمراتبی باشد.
+ در نهایت، در مرحله چهارم، ماژول اجرا، تصمیم نهایی را عملی میکند. این میتواند شامل فعالسازی یا غیرفعالسازی مولفههای موجود، تنظیم پارامترهای داخلی، یا حتی بازآرایی مجدد(reconfiguration) ساختار سیستم باشد.
+ همه مراحل بالا نیازمند اطلاعات، قوانین و تجربه هستند. این اطلاعات در مولفهی دانش نگهداری شده و ممکن است به صورت دستی تعریف شده یا از طریق یادگیری در طول زمان بهروزرسانی شوند.

Rainbow: توسعهیافتهتر و با تمرکز بر معماری سیستم
معماری Rainbow توسط Garlan و همکاران وی پیشنهاد شد. این چارچوب بر پایه MAPE-K ساخته شده اما با افزودن یک زبان خاص به نام Stitch، امکان تعریف سیاستهای انطباقپذیر را نبز فراهم میکند. مزیت بزرگ این چارچوب، پشتیبانی از بازپیکربندی معماری در زمان اجرا است، که در شرایط تغییر گسترده در ساختار سیستم بسیار حیاتی و ضروری تلقی می شود.
DiVA: مبتنی بر مدل رانه (Model-Driven)
چارچوب DiVA بیشتر در فاز طراحی مورد استفاده قرار میگیرد. در این رویکرد، مدلهایی از رفتار سیستم تعریف میشوند و تطبیق بهعنوان بخشی از تحلیل مدل انجام میگیرد. مزیت DiVA در فرمالسازی بالا و قابلیت شبیهسازی دقیق پیش از پیادهسازی است، اما در مواجهه با شرایط ناپایدار زمان اجرا عملکرد مناسبی ندارد.

Zanshin: مبتنی بر اهداف (Goal-Oriented)
Zanshin رویکردی هدفمحور (goal-oriented) دارد و برخلاف دیگر چارچوبها، روی «انحراف از اهداف» بهعنوان محرک اصلی انطباق تمرکز می نماید. این معماری در مواقعی که اهداف سیستم قابل فرموله شدن هستند و ممکن است اولویتها تغییر کنند، بسیار مفید است. به عنوان مثال اگر هدف اولیه «کاهش مصرف انرژی» باشد ولی در وضعیت اضطراری، «افزایش ایمنی» در اولویت قرار گیرد.

* مقایسه تطبیقی چارچوبها
برای درک بهتر نقاط قوت و ضعف هر یک از این چارچوبها و انتخاب مناسبترین گزینه برای کاربردهای مختلف، خوب است یک جدول تحلیلی کنیم. این جدول با بیان ویژگیهای کلیدی، قابلیتها و محدودیتهای هر چارچوب را در چند معیار مهم با هم و مقایسه آن ها به ما کمک می کند که در مدل پیشنهادی نکات حائز اهمیت را ذکر نماییم.

همانطور که در جدول بالا قابل مشاهده است، بر اساس تحلیلهای نظری، بررسی معماریهای موجود، و مطالعه موردی سیستمهای خودروهای خودران، معماری پیشنهادی این پروژه بر پایه چارچوب MAPE-K طراحی شده است.چراکه ، با توجه به بررسی چارچوبهای موجود و نقاط قوت و ضعف هرکدام، نیاز به یک معماری خودتطبیقپذیر خاص با ویژگیهای منحصر به فرد در حوزه کاربردی مورد نظر احساس میشود.
* نیازهای خاص معماری برای خودروهای خودران
پیش از پرداختن به اجزای اصلی معماری پیشنهادی خوب است نیاز های کلیدی معماری در سیستمهای خودرو خودران را بیان کنیم. بر اساس تحلیل منابع و مقالات معتبر و بررسی ویژگیهای سیستمهای واقعی، معماری طراحیشده برای خودروهای خودران باید مجموعهای از ویژگیهای کلیدی را در بر داشته باشد. نخست آنکه، تحلیل دادهها باید بهصورت بلادرنگ و با حداقل تاخیر انجام شود، که این امر میتواند از طریق بهکارگیری ماژولهای تحلیل سریع یا یادگیری ماشینی تحقق یابد. همچنین، سیستم باید قادر به واکنش خودکار و مستقل از مداخله انسانی باشد تا در مواجهه با موقعیتهای اضطراری، عملکردی با ایمنی بالا و سریع ارائه دهد. ویژگی مهم دیگر، توانایی بازیابی خودکار در شرایط بحرانی یا به اصطلاح Self-healing است که تضمینکنندهی پایداری عملکرد سیستم در زمان بروز خطا خواهد بود. علاوه بر این، معماری باید به گونهای طراحی شود که حتی در شرایط عدم قطعیت یا در مواجهه با دادههای ناقص، بتواند تصمیمگیری منطقی و قابل اعتماد انجام دهد. شاید برای شما جالب باشد که بدانید، در خودروهای خودران شاهد پارامتر هایی هستیم، که گاها اطلاعاتی از آن ها در دسترس نبوده و تنها به کمک عملکرد ماشین، متوجه تغییرات آن ها می شویم. در نهایت، قابلیت توسعهپذیری و انعطافپذیری بالا در برابر شرایط متنوع محیطی، از دیگر الزامات ضروری در طراحی چنین سیستمهایی محسوب میشود.

نکتهی حائز اهمیت که در طراحی مدل مفهومی باید در نظر گرفته شود، این است که معماری پیشنهادی این پروژه بر پایه چارچوب MAPE-K می تواند باشد اما برخلاف نسخهی کلاسیک آن، این مدل باید دارای ماژولهای تقویتشده و هوشمندتر است تا بتواند در محیطهای پیچیده، مانند جادههای شهری یا شرایط اضطراری (مانند شرایط بد جوی)، عملکرد پایداری ارائه دهد. مدل مفهومی پیشنهادی بر اساس تحلیل دقیق نیازهای سیستمهای خودران طراحی شده است و تلاش میکند محدودیتهای چارچوبهای پیشین را پوشش دهد و قابلیتهایی مانند یادگیری، خودترمیمی و تطبیق را به صورت یکپارچه فراهم کند. به عبارت دیگر، متناسب با اطلاعات موجود در کتاب Self-Adaptive Systems نوشته ی Danny Weyns ، ترکیب شدن موج پنجم (عدم قطعیت) و موج هفتم (یادگیری) از هفت موج موجود در این سیستم ها، می تواند کمک شایانی به بهبود عملکرد و ایمنی سیستم های بلادرنگ کند. در ادامه، اجزای اصلی معماری پیشنهادی و نحوه عملکرد چرخه تطبیق آن تشریح خواهد شد.
* توضیح اجزای معماری پیشنهادی به تفکیک:
1. پایش پیشرفته (Monitoring)
در این معماری، ماژول مانیتورینگ نهتنها دادههای پایه را دریافت میکند، بلکه با کمک زیرسیستمهای پردازشی، دادهها را از منابع مختلف بهصورت همزمان ترکیب و پالایش میکند. این مانیتورینگ چندمنظوره به سیستم اجازه میدهد تا از دادههای حسگرها، لاگها و منابع بیرونی (به عنوان مثال سیستمهای ابری) استفاده کند.
2. تحلیل تطبیقی با یادگیری (Analysis)
ماژول تحلیل در مدل پیشنهادی یک ماژول ساده rule-based نیست. بلکه ترکیبی از:
تحلیل وضعیت فعلی
تحلیل روندهای قبلی (رفتار گذشته سیستم)
پیشبینی وضعیت آینده
این تحلیل با کمک الگوریتمهای یادگیری ماشین (مثل random forest یا شبکههای عصبی سبک) انجام میشود. هدف این است که سیستم بتواند الگوهای پنهان در دادهها را شناسایی کرده و پیشبینی وقوع خطا یا شرایط بحرانی را ممکن کند.برای مثال: اگر عمل ترمز و میزان فاصله از خودرو جلویی در شرایط خاص از الگو خارج شود، سیستم قبل از برخورد واکنش نشان دهد.
3. برنامهریزی چندهدفه (Planning)
در معماری کلاسیک، برنامهریزی به طور معمول با مجموعهای از if-thenهای از پیشتعریفشده انجام میشود. اما در این مدل، برنامهریز با توجه به شرایط:
چند گزینهی مختلف را در نظر میگیرد
اثر هر گزینه را روی چند هدف مختلف (ایمنی، مصرف انرژی، زمان پاسخ) ارزیابی میکند
از بین آنها بهترین گزینه را انتخاب میکند
این فرآیند در برخی موارد به کمک الگوریتمهای تصمیمگیری چندهدفه (Multi-objective decision-making) پیادهسازی میشود.
4. اجرا به کمک قابلیت خودترمیمی (Execution)
ماژول اجرایی نهتنها تصمیمها را اجرا میکند، بلکه اگر خطا، هرگونه تاخیر یا اختلال در اجرا رخ دهد، به کمک زیرماژول «Self-Healing» تلاش میکند وضعیت را پایدار نگه دارد. این ممکن است شامل:
سوییچکردن بین ماژولهای سختافزاری
بازیابی از نسخهی پشتیبان
یا ورود به حالت safe mode باشد
5. Knowledge (پایگاه دانش پویا)
پایگاه دانش در این معماری فقط یک منبع ایستا از قوانین نیست. بلکه با به روز رسانی خود به کمک یادگیری از دادهها در زمان اجرا، عملکرد بهتری به نمایش می گذارد.. در واقع، این پایگاه دارای دو بخش است:
بخش ایستا (قوانین پایه و اهداف اولیه)
بخش پویا (نتایج یادگیری و تجربههای گذشته)
* ویژگیهای کلیدی معماری پیشنهادی:
معماری پیشنهادی این پروژه با تمرکز بر نیازهای خاص سیستمهای خودتطبیقپذیر بلادرنگ، بهویژه در حوزهی خودروهای خودران، طراحی شده است. یکی از ویژگیهای برجسته این معماری، پشتیبانی از تحلیل پیشبینانه (Predictive Analysis) است؛ به این معنا که سیستم نهتنها وضعیت فعلی را پایش میکند، بلکه با تحلیل روندها و دادههای گذشته، قادر است وضعیتهای بحرانی آینده را پیشبینی و برای آنها آمادهسازی لازم را انجام دهد. دومین ویژگی مهم، سازگاری کامل با الزامات بلادرنگ است؛ اجزای این معماری بهگونهای طراحی شدهاند که تصمیمگیری و انطباق با تغییرات محیطی در کمترین زمان ممکن و بدون وقفه صورت گیرد. همچنین، این معماری از قابلیت بازیابی خودکار (Self-healing) بهرهمند است؛ در نتیجه، سیستم میتواند در صورت بروز خطا یا خرابی، بهطور خودکار اقدام به ترمیم و بازگشت به حالت پایدار نماید. نکته قابل توجه دیگر، انعطافپذیری بالای معماری پیشنهادی است که امکان گسترش آن به سایر حوزهها مانند رباتهای مستقل یا شبکههای ارتباطی پویا را نیز فراهم میکند. این ویژگیها، معماری پیشنهادی را به گزینهای مناسب برای طیف وسیعی از سامانههای هوشمند و حیاتی تبدیل میکند و این معماری دقیقا مطابق با نیاز های خاص معماری برای خودرو های خودران نیز می باشد.
در طراحی معماریهای نرمافزار، به خصوص سیستمهای خودتطبیقپذیر، تحلیل و ارزیابی معماری تنها در سطح طراحی ایستا کافی نیست. زیراکه این سیستمها در زمان اجرا با شرایط متغیر و غیرقطعی مواجهاند، و تصمیمگیری آنها ممکن است بر پایهی احتمالات، محدودیتهای زمانی، یا عدم قطعیت محیطی باشد. ابزارهایی مانند PRISM Model Checker و Storm به معماران نرمافزار این امکان را میدهند که مدل رفتاری سیستم خود را در قالب ساختارهایی مانند Markov Decision Process (MDP) یا CTMC ساخته و سپس احتمال موفقیت سناریوها را بررسی کرده و به دنبال آن، زمان رسیدن به یک وضعیت ایمن را محاسبه کنند. در نهایت بهترین سیاست تصمیمگیری را از میان چند گزینه مقایسه کرده و به آن تصمیم عمل نمایند. به عنوان نمونه در این پروژه، از PRISM برای مدلسازی یک سناریوی بحرانی در سیستم خودرو خودران استفاده شده است. این مدل امکان تحلیل این موضوع را فراهم میکند که معماری پیشنهادی چگونه و با چه احتمالی میتواند در شرایط بحرانی رفتار پایدار ارائه دهد.
استفاده از PRISM نهتنها به تحلیل کمی (probabilistic) سیستمها کمک میکند، بلکه امکان مقایسه سیاستهای تصمیمگیری، محاسبه احتمال رسیدن به اهداف سیستم، و تحلیل trade-offها در رفتار تطبیقی را فراهم میسازد.
بهمنظور نمایش کاربردی بودن این رویکرد در پروژه، در ادامه یک سناریوی نمونه در زمینهی سیستمهای خودرو خودران طراحی و با استفاده از PRISM مدلسازی شده است. هدف از این مدل، تحلیل واکنش معماری پیشنهادی در مواجهه با یک خطای بحرانی — یعنی از کار افتادن سیستم GPS — و بررسی احتمال رسیدن به وضعیت ایمن با استفاده از سه مسیر واکنشی مختلف است. این سناریو نهتنها نشاندهندهی قابلیت معماری در مدیریت تطبیقی خطاهاست، بلکه امکان ارزیابی دقیقتر سیاستهای خودترمیمی و تحلیل تصمیمگیری در زمان اجرا را فراهم میکند.
تحلیل سناریوی بحرانی (اختلال GPS)
برای ارزیابی عملی یکی از رفتارهای معماری پیشنهادی در شرایط بحرانی، یک سناریو نمونه با استفاده از ابزار PRISM مدلسازی و تحلیل شد. در این مدل، فرض بر این بود که خودرو در حین حرکت با اختلال در GPS مواجه میشود و باید بین سه مسیر واکنشی یکی را انتخاب کند:
استفاده از حسگرهای جایگزین
ورود به حالت ایمن (Safe Mode)
تلاش برای بازیابی GPS
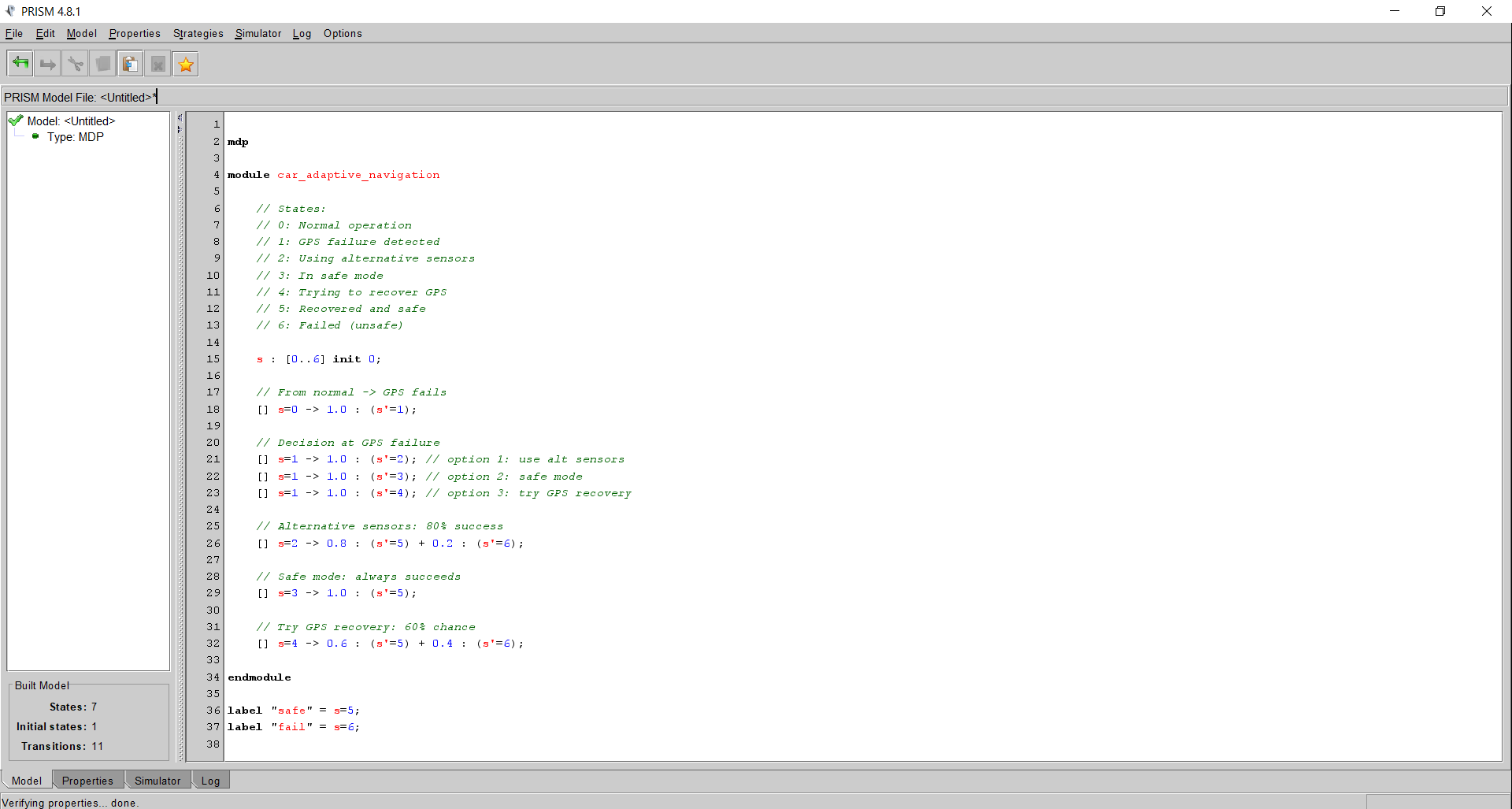

تحلیل کمینه احتمال رسیدن به وضعیت ایمن، با استفاده از عبارت Pmin=? [ F \"safe\" ]، عدد ۰.۶ (۶۰٪) را برگرداند. این یعنی اگر سیستم بدترین مسیر ممکن را انتخاب کند (مثلاً مسیر بازیابی GPS)، احتمال رسیدن به وضعیت ایمن تنها ۶۰٪ است، که برای یک سیستم بحرانی مثل خودرو خودران، قابل قبول نیست.
این تحلیل نشان میدهد که انتخاب واکنش مناسب در طراحی ماژول «Planning» نقش حیاتی دارد. معماری باید بهگونهای طراحی شود که تصمیمات آن نه بر اساس انتخاب تصادفی، بلکه با تحلیل شرایط و سیاستهای اطمینانپذیر (reliability-aware) گرفته شود.
همچنین، این خروجی نشان میدهد که اگر سیستم از قابلیت یادگیری در زمان اجرا برخوردار باشد، میتواند به مرور بفهمد که مسیرهایی مانند «ورود به حالت ایمن» موفقتر هستند و سیاستهای خود را مطابق آن تغییر دهد.
استفاده از PRISM در این پروژه، نهفقط بهعنوان ابزار شبیهسازی، بلکه بهعنوان مکمل معماری نرمافزار برای تحلیل رفتار زمان اجرا، نقش مهمی در ارزیابی تطبیقپذیری معماری پیشنهادی ایفا کرده است.
تحول سریع فناوریهای نرمافزاری و افزایش پیچیدگی محیطهای عملیاتی، سیستمهایی را میطلبد که بتوانند در زمان اجرا، بدون مداخلهی انسانی و با به کمک توانمندیهای درونی، رفتار خود را تحلیل و اصلاح کنند. معماریهای خودتطبیقپذیر یکی از مهمترین پاسخها به این چالش هستند که با ادغام رفتارهای هوشمند، چرخههای بازخورد و قابلیتهای تصمیمگیری پویا، بنیان سیستمهای آینده را شکل میدهند.
مسیرهای آینده تحقیق
این پروژه، نقطه شروعی برای ادامهی مسیر تحقیقاتی در حوزهی معماریهای تطبیقپذیر است. پیشنهادهایی برای گسترش آیندهی پژوهش به شرح زیر است:
شبیهسازی گسترده معماری پیشنهادی
با استفاده از ابزارهایی مانند PRISM، MATLAB Simulink، یا Unity-based simulators میتوان رفتار معماری را در سناریوهای متنوع و واقعگرایانه بررسی و اصلاح کرد.
پیادهسازی پروتوتایپ و ارزیابی آن
توسعهی یک نمونهی اولیه (Prototype) از معماری در یک محیط نرمافزاری واقعی میتواند نتایج مدل مفهومی را به واقعیت نزدیکتر کند.
استفاده از الگوریتمهای یادگیری تقویتی (Reinforcement Learning)
برای بهبود ماژول برنامهریزی و تحلیل در زمان اجرا، استفاده از RL میتواند به سیستم امکان دهد با یادگیری از تجربههای قبلی، تصمیمات هوشمندانهتر بگیرد.
گسترش معماری برای تطبیق چندلایهای (Multi-layer Adaptation)
در معماریهای پیچیده، تطبیق میتواند در سطوح مختلف (معماری، داده، شبکه) انجام شود. طراحی معماریهایی که این سطوح را یکپارچه مدیریت کنند، از مهمترین موضوعات آینده است.
در نهایت، این پروژه نشان داد که پیوند میان طراحی معماری تطبیقپذیر و تحلیل رفتاری مبتنی بر ابزارهای رسمی، نهتنها امکانپذیر است، بلکه میتواند به توسعهی سیستمهای هوشمند و مقاوم در برابر تغییرات کمک بسیاری نماید. چنین رویکردی میتواند مسیر توسعهی سیستمهای هوشمند آینده را هموارتر، قابل اعتمادتر و انعطافپذیرتر کند. آیندهی این حوزه وابسته به توانایی ما در درک عمیقتر از «یادگیری، تصمیمگیری، و خودمدیریتی نرمافزار» خواهد بود.
Weyns, D. (2019). An Introduction to Self-Adaptive Systems. انتشارات Springer.
Garlan, D., Cheng, S.-W., & Schmerl, B. (2004). Rainbow: Architecture-Based Self-Adaptation with Reusable Infrastructure. در مجله IEEE Computer.
Salehie, M., & Tahvildari, L. (2009). Self-Adaptive Software: Landscape and Research Challenges. منتشر شده در مجله ACM Transactions on Autonomous and Adaptive Systems.
Morandini, M., Penserini, L., & Perini, A. (2009). Towards Goal-Oriented Development of Self-Adaptive Systems. در کارگاه SEAMS، همایش ICSE.
Oliveira, D. de, Rubira, C. M. F., & de Lemos, R. (2021). A Conceptual Framework for Behavioral Maps in Self-Adaptive Systems. در مجله Journal of Systems and Software
Taheri, S., Ashraf, A., & Jalili, P. (2024). A Survey of Decision-Making and Planning Methods for Self-Driving Vehicles. منتشر شده در مجله ACM Computing Surveys.
Zhao, Y., Chen, K., & Wang, H. (2022). World Models for Autonomous Driving: An Initial Survey. در مجله IEEE Access.
Souza, R., Reinehr, R. H., & Malucelli, A. (2015). Zanshin: A Requirements-based Monitoring and Adaptation Framework for Self-Adaptive Systems. در مجله Journal of Systems and Software.
«این مطلب، بخشی از تمرینهای درس معماری نرم افزار در دانشگاه شهیدبهشتی است»